平时很少玩游戏,玩的最多的可能是老掉牙的CS和求生之路, 都是一些FPS游戏,沉迷于打打杀杀的刺激。一直知道游戏的开发是比较复杂的,也不曾去深究。
前段时间买了个WINDOWS平板,里面的扫雷很不错,所以玩的比较多,其中有个很奇妙的现象,那个扫雷的小人可以从障碍中(可能只有一个出口)走出来到鼠标点击的地方,想到这其中肯定应用了寻路算法。
请教了一下谷歌娘,发现讨论了最多的就是A*算法,初步看了一下,觉得很有趣,就添加到了TODO list里面,准备花点时间学习一下。
什么是A*算法
A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法。在包含各种障碍物的地图中,为游戏角色的移动,寻找一条到目标地点最短路径。这个算法不同于A算法,是因为使用了一个启发函数,用来趋势每一步的走向。
A*算法原理
本文使用了那套最经典的图(来自A* Pathfinding for Beginners,感谢原作者的制作)
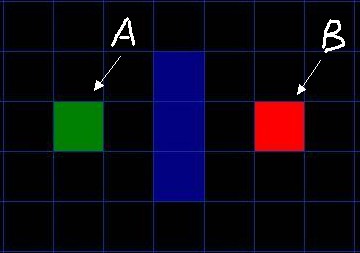
游戏中的地图,都可以看成一个方块集合。上图A表示起点,B表示终点,蓝色方块表示障碍物,我们需要找出一条路,从A点开始,绕过蓝色方块,到达B点。
寻路步骤
首先说一下用到的名词:
- 开放列表:记录没有检查过的方格
- 关闭列表:记录已经检查过的方格
步骤
1. 把A放入开放列表
2. 找出从A点开始移动一步能到达的方块并加入到开放列表,就是环绕A点的方块,如果是障碍物就不加入开放列表
3. 把A点从开放列表删除,并加入关闭列表,因为A点已经被检查过了

上图绿色边框的方块表示已经加入开发列表,等待下一次检查;中间淡蓝色边框则表示已经被加入关闭列表,不需要再次检查。
然后进入下一步, 从开放列表中找出下一步的要走的方格,那怎么确定下一步要走的方格?
这就是A*算法的核心部分,使用了一个函数引导每一步的走向:
F=G+H
G 表示从起点方格移动到网格上指定方格的移动耗费 (可沿斜方向移动).
H 表示从指定的方格移动到终点方格的预计耗费 (H启发函数).
为了便于计算,向上下左右移动的代价(函数中的G)为10, 向斜线方向移动为14 (其实就是对10^2+10^2之和开平方)。 而函数中的H,采用的是曼哈顿距离,表示两点之间分别在X,Y轴方向之差的和。
| 所以在一个平面上,坐标(x1, y1)的i点与坐标(x2, y2)的j点的曼哈顿距离为:d(i,j)= | X1-X2 | + | Y1-Y2 | 。 |
| 很容易知道,P(3,4)和P(5,3)的曼哈顿距离为H= | 5-3 | + | 3-4 | = 3 |
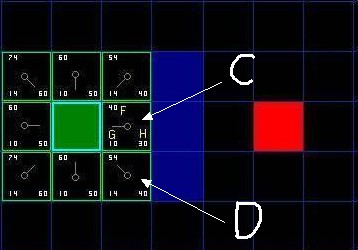
如上图,每个方块的左上角表示F值,左下角表示G值,右下角表示H值。
以绿色背景方块为起点,移动到其周围的方块的G值为10或14。
至于H值,我们计算起点周围每一个方块据红色(终点)的曼哈顿距离,把地图标上 x,y轴,拿到每一个方块的坐标再和终点计算一下就能得到相应的H值。
G值和H值都确定了,相加即可得到F值。
好,所有的东西都准备好了,现在可以确定了下一步走到那个方块了。
之前的三步中,我们已经把起点周围的方块加入到开启列表中了,现在找出开启列表中F值最小的方块,也就是绿色方块右侧的那块,标记为C(F值为40),然后对C进行以下处理:
4. 把它从 "开启列表" 中删除, 并放到 "关闭列表" 中.
5. 检查它所有相邻并且可以到达 (障碍物和 "关闭列表" 的方格都不考虑) 的方格. 如果这些方格还不在 "开启列表" 里的话, 将它们加入 "开启列表", 计算这些方格的 G, H 和 F 值各是多少, 并设置它们的 "父方格" 为 C(这里要注意一下,G值是表示从当前点移动到指定点的代价,所以这一步新加入开启列表的点,要以C点的G值为基准再加相应的代价).
6. 如果某个相邻方格 D 已经在 "开启列表" 里了, 检查如果用新的路径 (就是经过C 的路径) 到达它的话, G值是否会更低一些, 如果新的G值更低, 那就把它的 "父方格" 改为目前选中的方格 C, 然后重新计算它的 F 值和 G 值 (H 值不需要重新计算, 因为对于每个方块, H 值是不变的). 如果新的 G 值比较高, 就说明经过 C 再到达 D 不是一个明智的选择, 因为它需要更远的路, 这时我们什么也不做.
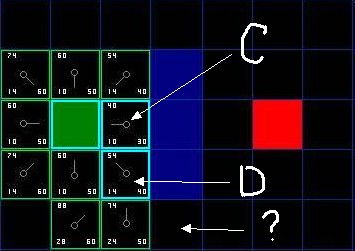
到这一步,说明我们从C走是不明智的,所以我们再从开启列表中拿取F值最小的那一个,这时候发现C上下两个方块的F值是一样的,我们随机选一个,选D,D的右边是墙,那我们是否可以直接走到D右下角那个方块(我们标记为E)?这个时候就需要我们在把方块加入开启的列表的时候设置是否可以“走对角”,本文是按照可以走对角的方式。
所以,我们从D方块走到了E方块,从“开启列表”移除了E方块,并加入“关闭列表”,再从“开启列表”中寻找F值最小的方块,再重复上面的步骤,直到目标点进入了“开启列表”中,表示已经找到。
整个过程,就是获取“开放列表”中F值最小的方块,把当前方块加入关闭列表,再加入该方块周围的八个方块,再获取“开放列表”中F值最小的方块…..
最后,被检查过的方块都会进入“关闭列表”,由于F值最小的方块再不断的加入关闭列表,整个路径的走向,按照F值减小,根据G值选择两个方块间最快的移动方式,不断的靠近终点。
想象下面这个过程,会有助于理解F值到底是怎么影响路径的选择的:
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,x,x,x,x,0,0,0},
{0,A,>,>,>,J,x,0,B,0},
{0,0,0,x,x,x,x,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0}
如上图,我们需要从A点走到B点,我们设了一个布袋陷阱(x表示障碍物),我们一起看下路径有没有可能一直往右走,然后出不来了?
最开始,按照F值最小和G值最小,路径一直会往右行走(进入布袋陷阱),直到走到J点,发现周围8个点都在“关闭列表”里面(J左侧的点已经被检查过了,障碍点都会被加入“关闭列表”),这个时候看一下上面的步骤,我们啥也不做,而是直接进入了下次循环,从“开启列表”中拿到F值最小的点,这个时候会拿到A点右上角或者右下角的点,拿到另外一条路径,成功逃出“布袋陷阱”。
最后的路径可能如下(*表示路径):
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,x,x,x,x,0,0,0},
{0,A,>,>,>,J,x,0,B,0},
{0,0,*,x,x,x,x,*,0,0},
{0,0,0,*,*,*,*,0,0,0},
{0,0,0,0,0,0,0,0,0,0}A*算法实现
主要代码:
while(this.openedList.size() > 0)
{
currentPoint = getMinPoint(this.openedList); // get current point
this.closedList.put(currentPoint.key, currentPoint);
this.openedList.remove(currentPoint.key);
// get surrounded points
surroundPoints = this.traversalSurroundPoints(currentPoint);
it = surroundPoints.iterator();
while(it.hasNext())
{
p = it.next();
if (p.walkable == 1 || this.closedList.containsKey(p.key)) continue;
// add new point to opened list
if (this.openedList.containsKey(p.key) == false)
{
p.parent = currentPoint;
p.g = this.getMoveType(p, currentPoint) == 1
? currentPoint.g + this.normalStepCost
: currentPoint.g + this.diagonallyStepCost;
this.openedList.put(p.key, p);
}
// check
if (this.openedList.containsKey(p.key)) {
int tempCost = this.getMoveType(p, currentPoint) == 1
? currentPoint.g + this.normalStepCost
: currentPoint.g + this.diagonallyStepCost;
if (p.parent != null)
tempCost += p.parent.g;
// find a least step
if (tempCost < p.g) {
p.g = tempCost;
p.parent = currentPoint;
}
}
// found
if (this.openedList.containsKey(this.end.key)){
this.generatePaths(this.openedList.get(this.end.key));
return this.path;
}
}
}
源代码:https://github.com/dongyado/awesome-stuff/tree/master/src/top/shares/funny/astar
学习过程中参考的最多的是create chen的那篇文章,对我了解A有很大的帮助。 本文的出发点,是把自己的对A 的理解按照自己的思路写出来,作为总结和备忘。
